
해당 포스트에서는 DDIM : Denoising Diffusion Implicit Models 논문을 함께 읽어가도록 하겠습니다. 문장마다 해석을 하기 보다는 각 문단에서 중요한 부분을 요약하는 식으로 진행하겠습니다.
Emoji의 의미는 아래와 같습니다.
🔎 : 논문에 있는 내용
💡 : 논문에 적혀있지 않은 사전지식
💭 : 저의 생각
⭐ : 중요한 내용
✅ : 나중에 확인이 필요한 내용
Abstract
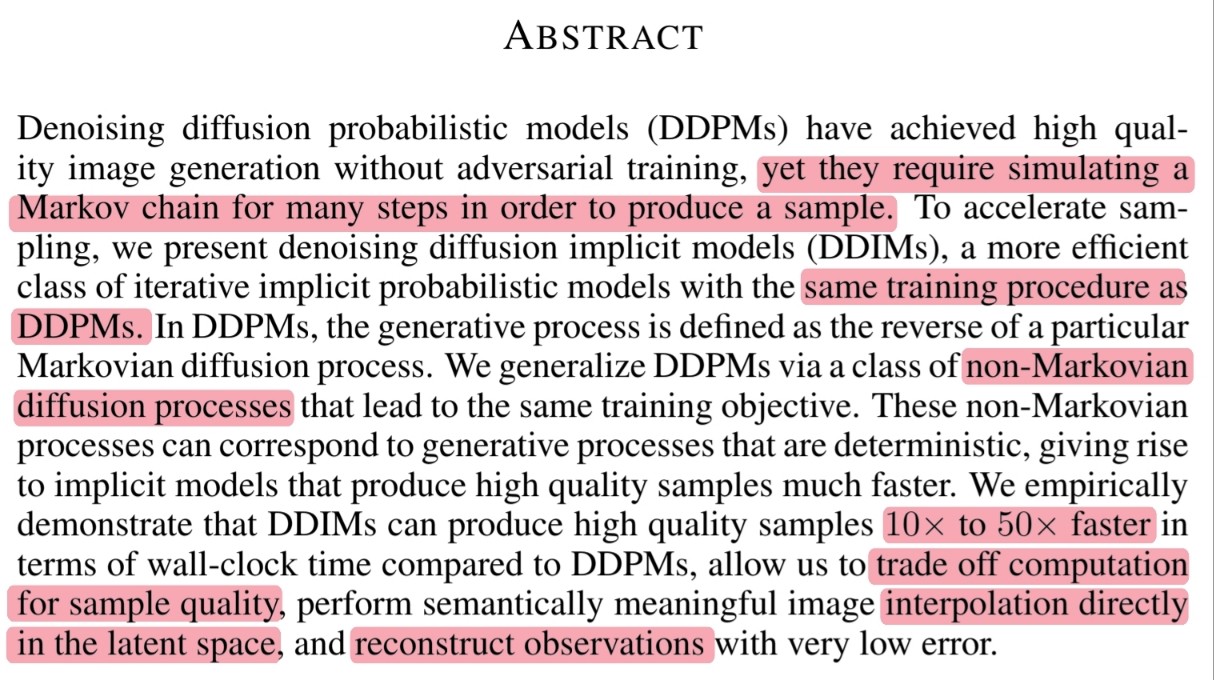
🔎 DDPM의 단점 : Sample을 생성하기위해 많은 step의 Markov chain 과정을 거쳐야 합니다.
🔎 DDIM : DDPM과 같은 objective function을 만드는 non-Markovian diffusion process를 통해 학습
- 10 ~ 50배 정도 DDPM보다 빠릅니다.
- Semantically meaningful image를 latent space에서 바로 interpolation을 통해 만들어낼 수 있습니다.
- 매우 낮은 reconstruction error를 관찰했습니다.
1. Introduction
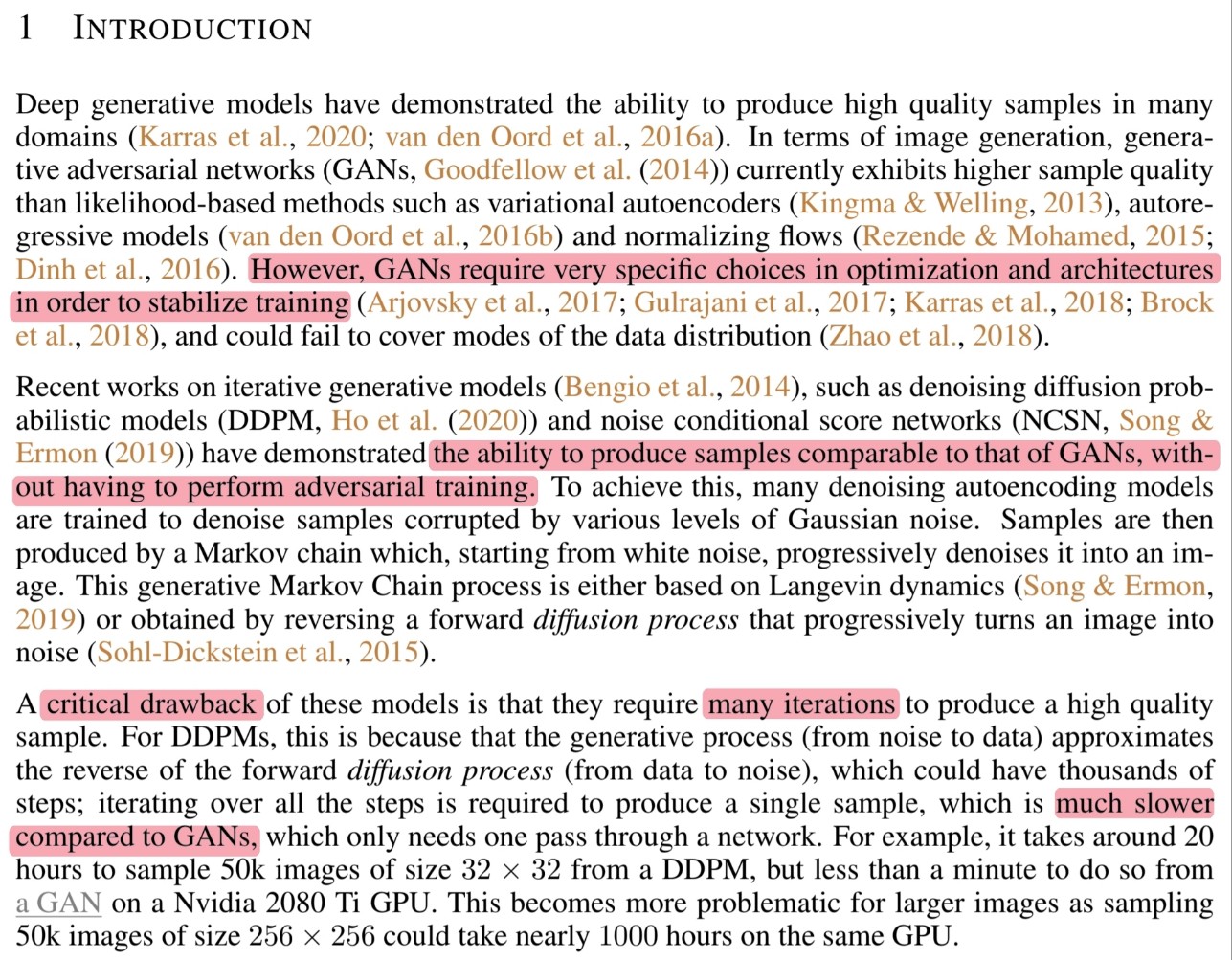
🔎 Generative model : GANs, VAE, Autoregressive models, normalizaing flows
🔎 그 중 GANs이 가장 좋은 품질을 만들어냈지만 학습 안정화를 하기 위해 매우 신중한 optimization과 architecture 선택이 필요합니다.
🔎 최근에는 iterative generative models에 대한 연구가 진행(DDPM, NCSN)
🔎 Iterative generative model은 GANs과 견줄만한 품질을 생성했으며 GANs에 비해 학습이 쉽다는 장점이 있습니다.
🔎 그러나 높은 품질의 sample을 생성하기 위해서는 많은 iteration이 필요해 GANs보다 매우 느리다는 단점이 있습니다.
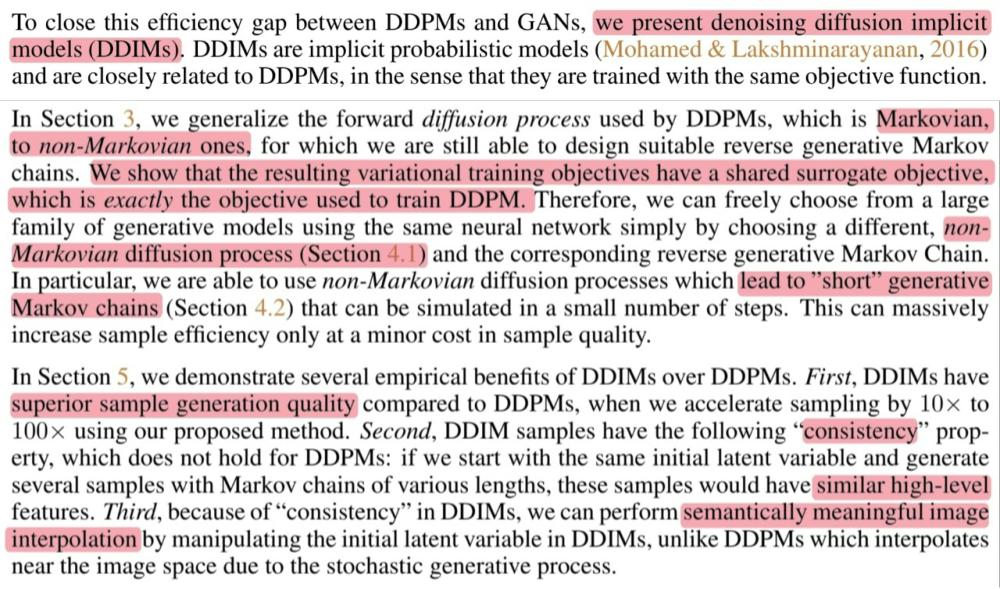
🔎 DDPM과 GANs의 gap을 줄이기위해 DDIM을 제시합니다.
🔎 DDIM은 DDPM의 objective function과 같은 objective function을 통해 학습을 진행합니다. (Section 3)
🔎 Diffusion process에서 DDPM과 달리 non-Markovian을 사용합니다. (Section 4.1)
🔎 Reverse process는 그대로 Markov chains을 사용하는데 짧은 Markov chains 사용합니다. (Section 4.2)
🔎 DDPM보다 나은 결과 (Section 5)
- 더 나은 품질의 sample을 더 빠른 속도로 생성
- DDIM으로 생성한 sample은 consistency를 가지고 있어 똑같은 initial latent variable과 다양한 길이의 Markov chain을 통해 생성된 sample은 비슷한 feature를 가지고 있습니다.
- Consistency 때문에 initial latent variable을 조작해서 의미있는 이미지를 만들어낼 수 있습니다.
2. Background

💡 해당 파트는 DDPM에 있는 내용을 복습하는 부분이므로 넘어가도록 하겠습니다.
💡 다만, notation이 다른 부분이 있어 그 부분만 말씀드리고 넘어가겠습니다. (DDIM $\Longrightarrow$ DDPM)
- $\alpha_t$ $\longrightarrow$ $\bar{\alpha}_t$
- ELBO term을 최대화하는 $\theta$를 찾는 문제 $\longrightarrow$ Negative ELBO term을 최소화하는 $\theta$를 찾는 문제
- $\gamma_t$ : 시간에 따른 가중치(계수) $\longrightarrow$ $\gamma_t = 1$
3. Variational Inference For Non-Markovian Forward Process
🔎 Generative model은 reverse of inference process을 approximate
- Inference process : Diffusion process / Forward process
- Reverse of inference process : Denoising process / Reverse process
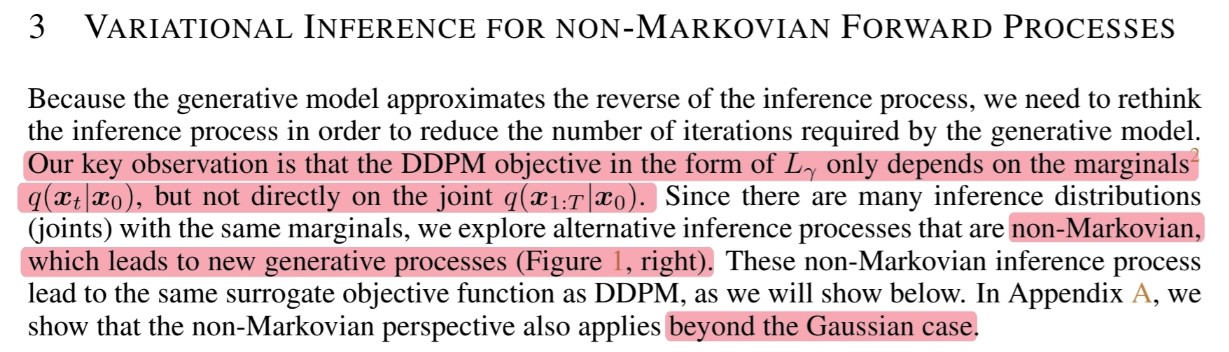
🔎 Generative model이 image를 생성하기 위해 필요한 iteration 수를 줄이기 위해 inference process를 다시 생각할 필요가 있습니다.
🔎 DDPM의 objective인 $L_\gamma$는 marginals $q(\mathbf{x}_t|\mathbf{x}_0)$에만 의존하고 joints $q(\mathbf{x}_{1:T}|\mathbf{x}_0)$에는 직접 의존하지 않습니다.
\[\begin{align} L_\gamma(\epsilon_\theta) :=& \sum^T_{t=1}\gamma_t\mathbb{E}_{\mathbf{x}_0\sim q(\mathbf{x}_0), \epsilon_T \sim \mathcal{N}(\mathrm{0}, \mathrm{I})}\Big[ \lVert \epsilon^{(t)}_\theta {\color{Red}\mathbf{x}_t}\ -\ \epsilon_t \rVert^2_2 \Big] & \qquad \\ =& \sum^T_{t=1}\gamma_t\mathbb{E}_{\mathbf{x}_0\sim q(\mathbf{x}_0), \epsilon_T \sim \mathcal{N}(\mathrm{0}, \mathrm{I})}\Big[ \lVert \epsilon^{(t)}_\theta (\sqrt{\alpha_t}{\color{Red}\mathbf{x}_0}\ +\ \sqrt{1-\alpha_t}\epsilon_t)\ -\ \epsilon_t \rVert^2_2 \Big] & \qquad \because \mathbf{x}_t = \sqrt{\alpha_t}\mathbf{x}_0\ +\ \sqrt{1-\alpha_t}\epsilon_t \end{align}\]🔎 같은 marginals $q(\mathbf{x}_t|\mathbf{x}_0)$을 가지는 joints $q(\mathbf{x}_{1:T}|\mathbf{x}_0)$가 많기 때문에 Non-Markovian inference process를 탐색하여 새로운 generative process로 이어지도록 합니다.
💭 $\mathbf{x}_t$를 만들 수 있는 $q(\mathbf{x}_{1:T}|\mathbf{x}_0)$는 많은데 그 중 Non-Markovian을 사용해서 특정 $\mathbf{x}_t$를 만들도록 해 새로운 generative process라 정의한다는 이야기인 것 같습니다.
🔎 새로운 generative process 또한 DDPM과 동일한 objective function을 사용할 수 있습니다.
🔎 또한 새로운 generative process를 만드는 가장 중요한 개념인 Non-Markovian이 Gaussian case를 넘어서도 적용됨을 보여주었습니다.
3.1 Non-Markovian Forward Processes
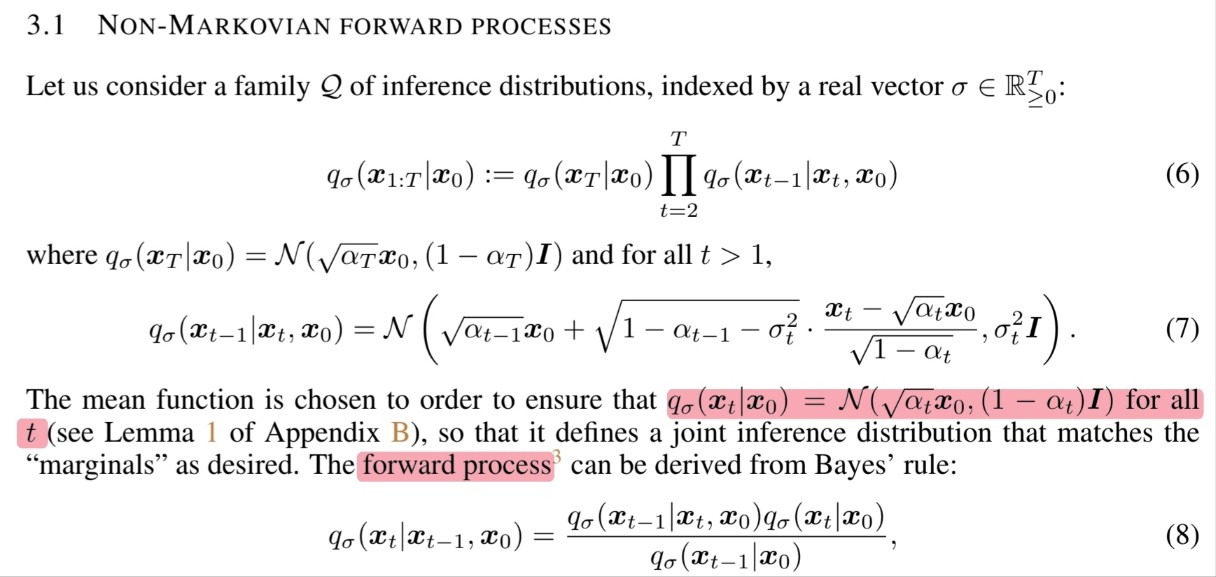
🔎 우선, inference process를 Non-Markovian으로 정의해보고자 합니다.
\[\begin{align} & q_\sigma(\mathbf{x}_{1:T}|\mathbf{x}_0) := q_\sigma(\mathbf{x}_T|\mathbf{x}_0)\prod^T_{t=2}q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0) \\ & \qquad \text{where} \\ & \qquad \qquad q_\sigma(\mathbf{x}_T|\mathbf{x}_0) = \mathcal{N}(\sqrt{\alpha_T}\mathbf{x}_0, (1-\alpha_T)\mathrm{I}) \\ & \qquad \qquad q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0) = \mathcal{N}\big(\sqrt{\alpha_{t-1}}\mathbf{x}_0 + \sqrt{1-\alpha_{t-1} - \sigma^2_t}\cdot \frac{\mathbf{x}_t - \sqrt{\alpha_t}\mathbf{x}_0}{\sqrt{1-\alpha_t}}, \sigma^2_t\mathrm{I}\big) \quad (t > 1) \end{align}\]🔎 위에서 정의한 inference process가 모든 $t$에서 성립함을 귀납법을 통해 증명해야 합니다.
$q_\sigma(\mathbf{x}_T|\mathbf{x}_0) = \mathcal{N}(\sqrt{\alpha_T}\mathbf{x}_0, (1-\alpha_T)\mathrm{I})$으로부터 $q_\sigma(\mathbf{x}_t|\mathbf{x}_0)$와 $q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_0)$을 정의
\[\begin{align} q_\sigma(\mathbf{x}_t|\mathbf{x}_0)\ =&\ \mathcal{N}(\sqrt{\alpha_t}\mathbf{x}_0, (1-\alpha_t)\mathrm{I}) \\ q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_0)\ =&\ \mathcal{N}(\sqrt{\alpha_{t-1}}\mathbf{x}_0, (1-\alpha_{t-1})\mathrm{I}) \end{align}\]$t$로부터 $t-1$를 유도할 수 있으면 모든 $t$에서 성립함을 증명
Bishop 2.115번 공식을 먼저 알아봐야 합니다.
- $p(\mathbf{x})$가 Gaussian이고 $p(\mathbf{y}|\mathbf{x})$ 또한 Gaussian distribution일 때 $p(\mathbf{y})$는 Gaussian
Bishop 2.115번 공식과 위에서 정의한 내용을 연결 시켜보도록 하겠습니다.
\[\begin{align} &p(\mathbf{x}) &\iff& \qquad q_{\sigma}(\mathbf{x}_t|\mathbf{x}_0)& \\ &p(\mathbf{y}|\mathbf{x}) &\iff& \qquad q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0) \\ &p(\mathbf{y}) &\iff& \qquad q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_0)& \\ \end{align}\]위에서 $q_{\sigma}(\mathbf{x}_t|\mathbf{x}_0)$와 $q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0)$를 Gaussian으로 정의했기 때문에 Bishop 2.115번 공식에 따라서 $q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_0)$는 Gaussian 이므로 아래와 같이 표기가 가능합니다.
\[\begin{align} & q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_0) = \mathcal{N}(\mu_{t-1}, \Sigma_{t-1}) \\ \\ & \qquad \text{where} \\ & \qquad \qquad q_\sigma(\mathbf{x}_t|\mathbf{x}_0)\ =\ \mathcal{N}(\sqrt{\alpha_t}\mathbf{x}_0, (1-\alpha_t)\mathrm{I}) \\ & \qquad \qquad q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0) = \mathcal{N}\big(\sqrt{\alpha_{t-1}}\mathbf{x}_0 + \sqrt{1-\alpha_{t-1} - \sigma^2_t}\cdot \frac{\mathbf{x}_t - \sqrt{\alpha_t}\mathbf{x}_0}{\sqrt{1-\alpha_t}}, \sigma^2_t\mathrm{I}\big) \quad (t > 1) \end{align}\]$q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0)$에 $\mathbf{x}_t$를 대입해서 $q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_0)$의 평균과 분산을 구합니다.
- 위에서 정의한 $q_\sigma(\mathbf{x}_t|\mathbf{x}_0)\ =\ \mathcal{N}(\sqrt{\alpha_t}\mathbf{x}_0, (1-\alpha_t)\mathrm{I})$로 부터 reparameterization trick을 통해 $\mathbf{x}_t$를 구합니다.
- $q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0)$에 $\mathbf{x}_t$ 대입하여 평균 파트와 분산 파트를 분리하여 계산하면 아래와 같습니다.
- 따라서 $q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_0)\ =\ \mathcal{N}(\sqrt{\alpha_{t-1}}\mathbf{x}_0, (1-\alpha_{t-1})\mathrm{I})$ 입니다.
$t$로부터 $t-1$를 유도하였으므로 귀납법에 의해서 모든 $t$에서 성립함을 증명할 수 있었습니다.
위에서 찾은 $q_{\sigma}(\mathbf{x}_t|\mathbf{x}_0)$, $q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_0)$, $q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0)$을 Bayes’ rule을 통해 $q_\sigma(\mathbf{x}_{t}|\mathbf{x}_{t-1}, \mathbf{x}_0)$을 구할 수 있습니다.
\[q_\sigma(\mathbf{x}_{t}|\mathbf{x}_{t-1}, \mathbf{x}_0) = q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_{t}, \mathbf{x}_0) \times \frac{q_{\sigma}(\mathbf{x}_t|\mathbf{x}_0)}{q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_0)}\]3번에서 찾은 Bayes’ rule을 통해 inference process를 정의할 수 있습니다.
\[q_\sigma(\mathbf{x}_{1:T}|\mathbf{x}_0) := q_\sigma(\mathbf{x}_T|\mathbf{x}_0)\prod^T_{t=2}q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0)\]

🔎 DDPM의 diffusion process와 달리 DDIM의 forward process(inference process)는 더 이상 Markovian이 아닙니다.
더 이상 forward process가 Markov process가 아니므로 diffusion process라고 부르지 않습니다. 따라서 Section 3에서 정리한 내용에 약간의 수정이 필요합니다.
- Inference process :
Diffusion process/ Forward process - Reverse of inference process :
Denoising process/ Reverse process / Generative process
- Inference process :
🔎 $\sigma$의 크기는 forward process가 stochastic 정도를 통제합니다.
$\sigma \rightarrow 0$ : 임의의 $t$에 대해 $\mathbf{x}_{0}$와 $\mathbf{x}_{t}$를 발견하는 한 하나의 $\mathbf{x}_{t-1}$를 찾을 수 있는 극단적인 경우에 도달합니다.
💭 DDPM에서는 다양한 $\mathbf{x}_{t}$가 나타날 수 있는데 DDIM에서는 Non-Markovian을 통해 나올 수 있는 $\mathbf{x}_{t}$의 경우의 수를 조절하는 것 같습니다. 이것을 조절하는 파라미터가 $\sigma$인 것 같습니다.
💭 그 중에서 $\sigma$가 0일 때 $\mathbf{x}_{t}$의 경우의 수를 하나로 고정하는 것 같습니다.
💭 이처럼 $\sigma$를 조절해서 이미지를 만들어가는 과정을 reverse process 대신 generative process라 부르는 것 같습니다.
3.2 Generative Process And Unified Vairational Inference Objective
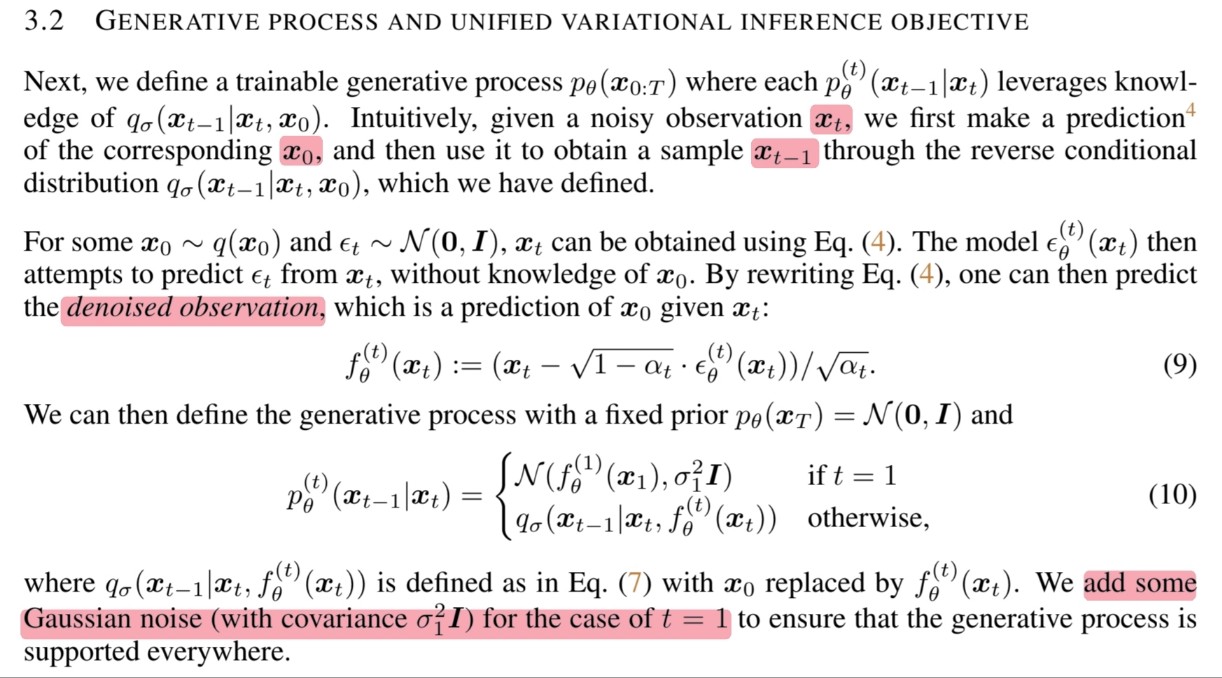
🔎 훈련 가능한 generative process $p_{\theta}(\mathbf{x}_{0:T})$에서 각 $p_{\theta}^{(t)}(\mathbf{x}_{t-1}|\mathbf{x}_{t})$는 $q_{\sigma}(\mathbf{x}_{t-1}|\mathbf{x}_{t}, \mathbf{x}_{0})$을 활용합니다.
🔎 $p_{\theta}^{(t)}(\mathbf{x}_{t-1}|\mathbf{x}_{t})$를 구하는 방법을 알아보겠습니다.
$\mathbf{x}_{0} \sim q(\mathbf{x}_{0})$이고 $\epsilon_{t} \sim \mathcal{N}(\mathrm{0}, \mathrm{I})$ 일 때 앞에서 정의한 식을 reparameterization trick을 활용해 $\mathbf{x}_t$를 구합니다.
\[\mathbf{x}_t = \sqrt{\alpha_t}\mathbf{x}_0\ +\ \sqrt{1-\alpha_t}\epsilon_t \qquad \because q_{\sigma}(\mathbf{x}_t|\mathbf{x}_0) = \mathcal{N}(\sqrt{\alpha_t}\mathbf{x}_0, (1 -\alpha_t)\mathrm{I})\]모델 $\epsilon_{\theta}^{t}(\mathbf{x}_{t})$은 $\mathbf{x}_{t}$로부터 $\epsilon_{t}$를 예측하고자 합니다.
\[L_\gamma(\epsilon_\theta) := \sum^T_{t=1}\gamma_t\mathbb{E}_{\mathbf{x}_0\sim q(\mathbf{x}_0), \epsilon_T \sim \mathcal{N}(\mathrm{0}, \mathrm{I})}\Big[ \lVert \epsilon^{(t)}_\theta (\mathbf{x}_{t})\ -\ \epsilon_t \rVert^2_2 \Big]\]모델 $\epsilon_{\theta}^{t}(\mathbf{x}_{t})$을 $\mathbf{x}_t = \sqrt{\alpha_t}\mathbf{x}_0\ +\ \sqrt{1-\alpha_t}\epsilon_t$에서 $\epsilon_t$ 대신 대입하고 해당 식을 $\mathbf{x}_0$으로 정리하면 아래와 같습니다.
\[\begin{align} f_{\theta}^{(t)}(\mathbf{x}_{t}) &=\ \hat{\mathbf{x}}_0 \\ &=\ (\mathbf{x}_t - \sqrt{1-\alpha_{t}}\cdot \epsilon_{\theta}^{t}(\mathbf{x}_{t})) / \sqrt{\alpha_{t}} \end{align}\]따라서 아래와 같이 나타낼 수 있습니다.
\[\begin{align} q_{\sigma}(\mathbf{x}_{t-1}|\mathbf{x}_{t}, \hat{\mathbf{x}}_{0}) &= q_{\sigma}(\mathbf{x}_{t-1}|\mathbf{x}_{t}, f_\theta^{(t)}(\mathbf{x}_t)) \\ &= \mathcal{N}\big(\sqrt{\alpha_{t-1}}f_{\theta}^{(t)}(\mathbf{x}_{t}) + \sqrt{1-\alpha_{t-1} - \sigma^2_t}\cdot \frac{\mathbf{x}_t - \sqrt{\alpha_t}f_{\theta}^{(t)}(\mathbf{x}_{t})}{\sqrt{1-\alpha_t}}, \sigma^2_t\mathrm{I}\big) \end{align}\]이제 generative process를 정의하겠습니다.
- $p_{\theta}(\mathbf{x}_{T}) = \mathcal{N}(\mathrm{0}, \mathrm{I})$로 고정
- Generative process가 모든 곳에서 작동하도록 하기 위해 $t=1$일 때 Gaussian noise를 추가합니다.
- 위에서 inference process를 정의할 때 $t$가 1보다 클 때 $q_{\sigma}(\mathbf{x}_{t-1}|\mathbf{x}_{t}, \mathbf{x}_{0})$을 정의했기 때문에 $t=1$일 때 따로 정의가 필요했음
- $p_{\theta}^{(1)}(\mathbf{x}_{0}|\mathbf{x}_{1}) = \mathcal{N}(f_\theta^{(1)}(\mathbf{x}_1),\ \sigma_1^2\mathrm{I})$
마지막으로 generative process를 정의하면 아래와 같습니다.
\[p_{\theta}^{(t)}(\mathbf{x}_{t-1}|\mathbf{x}_{t})= \begin{cases} \mathcal{N}(f_\theta^{(1)}(\mathbf{x}_1),\ \sigma_1^2\mathrm{I}), & \text{if } t = 1 \\ q_{\sigma}(\mathbf{x}_{t-1}|\mathbf{x}_{t}, f_\theta^{(t)}(\mathbf{x}_t)), & \text{otherwise} \end{cases}\]
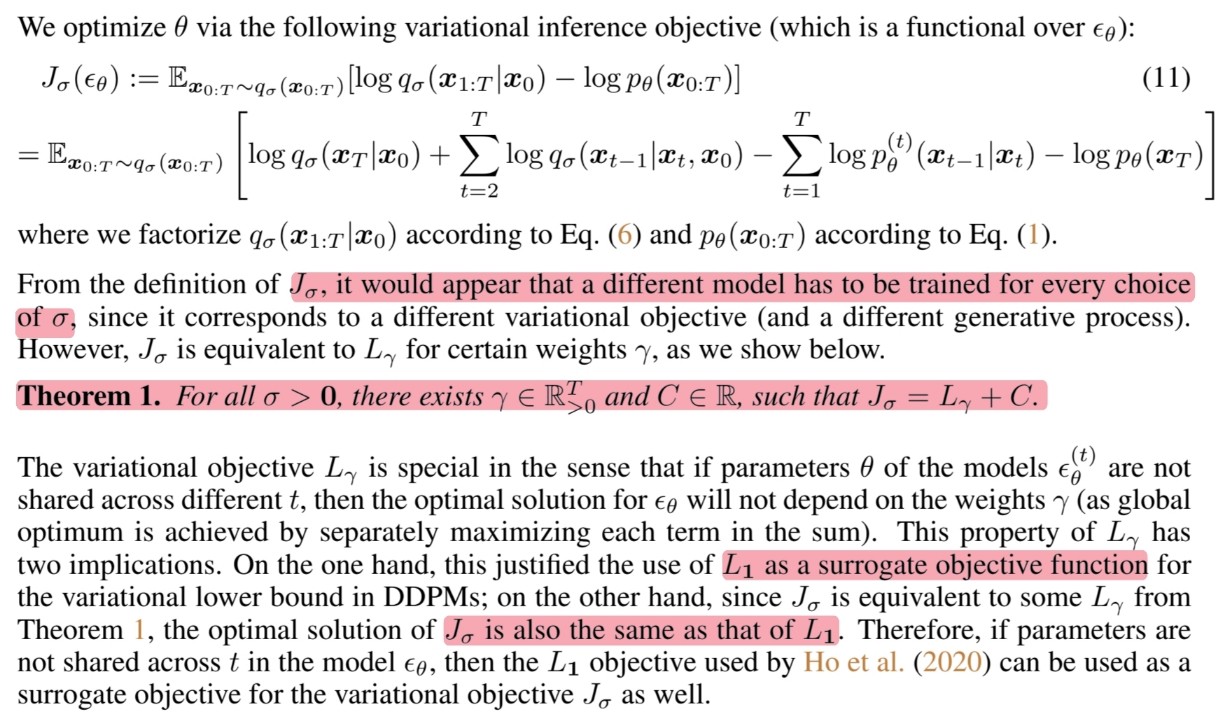
🔎 해당 논문에서는 아래와 같이 objective function을 정의했습니다.
\[\begin{align} J_{\sigma} :=& \ \mathbb{E}_{\mathbf{x}_{0:T}\sim q_{\sigma}(\mathbf{x}_{0:T})}[\log q_\sigma(\mathbf{x}_{1:T}|\mathbf{x}_{0}) - \log p_{\theta}(\mathbf{x}_{0:T})] & \qquad \\ =&\ \mathbb{E}_{\mathbf{x}_{0:T}\sim q_{\sigma}(\mathbf{x}_{0:T})}\Bigg[\bigg(\log q_\sigma(\mathbf{x}_T|\mathbf{x}_0)\prod^T_{t=2}q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_t,\mathbf{x}_0) \bigg) - \bigg(\log p_\theta(\mathbf{x}_T)\prod^T_{t=1}p_\theta^{(t)}(\mathbf{x}_{t-1}|\mathbf{x}_t) \bigg)\Bigg] & \qquad \\ =& \ \mathbb{E}_{\mathbf{x}_{0:T}\sim q_{\sigma}(\mathbf{x}_{0:T})}\Bigg[ \log q_\sigma(\mathbf{x}_T|\mathbf{x}_0) + \sum^T_{t=2}\log q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_{t}, \mathbf{x }_{0}) - \sum^T_{t=1} \log p_\theta^{(t)} (\mathbf{x}_{t-1}|\mathbf{x}_t) - \log p_\theta(\mathbf{x}_T) \Bigg] & \qquad \\ =& \ \mathbb{E}_{\mathbf{x}_{0:T}\sim q_{\sigma}(\mathbf{x}_{0:T})}\Bigg[ \log q_\sigma(\mathbf{x}_T|\mathbf{x}_0) + \sum^T_{t=2}\log \frac{q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0)}{p^{(t)}_\theta(\mathbf{x}_{t-1}|\mathbf{x}_t)} - \log p^{(1)}_\theta(\mathbf{x}_0|\mathbf{x}_1) - \log p_\theta(\mathbf{x}_T) \Bigg] & \qquad \\ \equiv& \ \mathbb{E}_{\mathbf{x}_{0:T}\sim q_{\sigma}(\mathbf{x}_{0:T})}\Bigg[ \sum^T_{t=2}\log \frac{q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0)}{p^{(t)}_\theta(\mathbf{x}_{t-1}|\mathbf{x}_t)} - \log p^{(1)}_\theta(\mathbf{x}_0|\mathbf{x}_1)\Bigg] & \qquad \because \text{학습에 필요하지 않은 부분 삭제}\\ =& \ \sum^T_{t=2}\mathbb{E}_{\mathbf{x}_{0:T}\sim q_{\sigma}(\mathbf{x}_{0:T})}\Bigg[\log \frac{q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0)}{p^{(t)}_\theta(\mathbf{x}_{t-1}|\mathbf{x}_t)}\Bigg] - \mathbb{E}_{\mathbf{x}_{0:T}\sim q_{\sigma}(\mathbf{x}_{0:T})}\big[\log p^{(1)}_\theta(\mathbf{x}_0|\mathbf{x}_1)\big] \\ =& \ \sum^T_{t=2}D_{KL}(q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_t,\mathbf{x}_0)\ ||\ p^{(t)}_\theta(\mathbf{x}_{t-1}|\mathbf{x}_t)) - \mathbb{E}_{\mathbf{x}_{0:T}\sim q_{\sigma}(\mathbf{x}_{0:T})}\big[\log p^{(1)}_\theta(\mathbf{x}_0|\mathbf{x}_1)\big] \end{align}\]위의 objective function에서 $t > 1$일 때를 살펴보겠습니다.
\[\begin{align} D_{KL}(q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_t,\mathbf{x}_0)\ ||\ p^{(t)}_\theta(\mathbf{x}_{t-1}|\mathbf{x}_t)) &= D_{KL}(q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_t,\mathbf{x}_0)\ ||\ q_{\sigma}(\mathbf{x}_{t-1}|\mathbf{x}_{t}, f_\theta^{(t)}(\mathbf{x}_t))) & \qquad \\ &= \mathbb{E}_{\mathbf{x}_{0},\ \mathbf{x}_{t}\ \sim\ q_{\sigma}(\mathbf{x}_{0},\ \mathbf{x}_{t})} \Bigg[\frac{1}{2\sigma^2_t}\lVert \mathbf{x}_0 - f^{(t)}_\theta(\mathbf{x}_t)\rVert^2_2\Bigg] & \qquad \because \text{분산이 같은 두 Gaussian distribution} \\ &= \mathbb{E}_{\mathbf{x}_{0}\ \sim\ q_{\sigma}(\mathbf{x}_{0}),\ \epsilon\ \sim \mathcal{N}(\mathrm{0},\ \mathrm{I}),\ \mathbf{x}_t=\sqrt{\alpha_t}\mathbf{x}_0 + \sqrt{1-\alpha_t}\epsilon_t} \Bigg[\frac{1}{2\sigma^2_t}\bigg\lVert \frac{\mathbf{x}_t - \sqrt{1-\alpha_t}\epsilon_t}{\sqrt{\alpha_t}} - \frac{\mathbf{x}_t - \sqrt{1-\alpha_t}\epsilon^{(t)}_\theta(\mathbf{x}_t)}{\sqrt{\alpha_t}} \bigg\rVert^2_2 \Bigg] \\ &= \mathbb{E}_{\mathbf{x}_{0}\ \sim\ q_{\sigma}(\mathbf{x}_{0}),\ \epsilon\ \sim \mathcal{N}(\mathrm{0},\ \mathrm{I}),\ \mathbf{x}_t=\sqrt{\alpha_t}\mathbf{x}_0 + \sqrt{1-\alpha_t}\epsilon_t}\Bigg[\frac{1-\alpha_t}{2\sigma^2_t\alpha_t}\bigg\lVert \epsilon_t\ -\ \epsilon^{(t)}_\theta(\mathbf{x}_t)\bigg\rVert^2_2 \Bigg] \end{align}\]이제는 objective function에서 $t=1$일 때를 살펴보겠습니다.
\[\begin{align} \mathbb{E}_{\mathbf{x}_{0},\ \mathbf{x}_{1}\ \sim\ q_{\sigma}(\mathbf{x}_{0},\ \mathbf{x}_{1})}\big[-\log p^{(1)}_\theta(\mathbf{x}_0|\mathbf{x}_1)\big] &\equiv \mathbb{E}_{\mathbf{x}_{0},\ \mathbf{x}_{1}\ \sim\ q_{\sigma}(\mathbf{x}_{0},\ \mathbf{x}_{1})}\Bigg[\frac{1}{2\sigma^2_1}\bigg\lVert\mathbf{x}_0 - f^{(1)}_\theta(\mathbf{x}_1) \bigg\rVert^2_2\Bigg] \\ &= \mathbb{E}_{\mathbf{x}_{0}\ \sim\ q_{\sigma}(\mathbf{x}_{0}),\ \epsilon\ \sim \mathcal{N}(\mathrm{0},\ \mathrm{I}),\ \mathbf{x}_1=\sqrt{\alpha_1}\mathbf{x}_0 + \sqrt{1-\alpha_1}\epsilon_1} \Bigg[\frac{1}{2\sigma^2_1}\bigg\lVert \frac{\mathbf{x}_1 - \sqrt{1-\alpha_1}\epsilon_1}{\sqrt{\alpha_1}} - \frac{\mathbf{x}_1 - \sqrt{1-\alpha_1}\epsilon^{(1)}_\theta(\mathbf{x}_1)}{\sqrt{\alpha_1}} \bigg\rVert^2_2 \Bigg] \\ &= \mathbb{E}_{\mathbf{x}_{0}\ \sim\ q_{\sigma}(\mathbf{x}_{0}),\ \epsilon\ \sim \mathcal{N}(\mathrm{0},\ \mathrm{I}),\ \mathbf{x}_1=\sqrt{\alpha_1}\mathbf{x}_0 + \sqrt{1-\alpha_1}\epsilon_1} \Bigg[\frac{1-\alpha_1}{2\sigma^2_1\alpha_1}\bigg\lVert \epsilon_1\ -\ \epsilon^{(1)}_\theta(\mathbf{x}_1)\bigg\rVert^2_2 \Bigg] \end{align}\]따라서 최종 objective function은 다음과 같습니다.
\[\begin{align} J_\sigma &\equiv \sum^T_{t=2}D_{KL}(q_\sigma(\mathbf{x}_{t-1}|\mathbf{x}_t,\mathbf{x}_0)\ ||\ p^{(t)}_\theta(\mathbf{x}_{t-1}|\mathbf{x}_t)) - \mathbb{E}_{\mathbf{x}_{0:T}\sim q_{\sigma}(\mathbf{x}_{0:T})}\big[\log p^{(1)}_\theta(\mathbf{x}_0|\mathbf{x}_1)\big] \\ &= \sum^T_{t=2}\mathbb{E}_{\mathbf{x}_{0}\ \sim\ q_{\sigma}(\mathbf{x}_{0}),\ \epsilon\ \sim \mathcal{N}(\mathrm{0},\ \mathrm{I}),\ \mathbf{x}_t=\sqrt{\alpha_t}\mathbf{x}_0 + \sqrt{1-\alpha_t}\epsilon_t}\Bigg[\frac{1-\alpha_t}{2\sigma^2_t\alpha_t}\bigg\lVert \epsilon_t\ -\ \epsilon^{(t)}_\theta(\mathbf{x}_t)\bigg\rVert^2_2 \Bigg] + \mathbb{E}_{\mathbf{x}_{0}\ \sim\ q_{\sigma}(\mathbf{x}_{0}),\ \epsilon\ \sim \mathcal{N}(\mathrm{0},\ \mathrm{I}),\ \mathbf{x}_1=\sqrt{\alpha_1}\mathbf{x}_0 + \sqrt{1-\alpha_1}\epsilon_1} \Bigg[\frac{1-\alpha_1}{2\sigma^2_1\alpha_1}\bigg\lVert \epsilon_1\ -\ \epsilon^{(1)}_\theta(\mathbf{x}_1)\bigg\rVert^2_2 \Bigg] \\ &= \sum^T_{t=1}\mathbb{E}_{\mathbf{x}_{0}\ \sim\ q_{\sigma}(\mathbf{x}_{0}),\ \epsilon\ \sim \mathcal{N}(\mathrm{0},\ \mathrm{I}),\ \mathbf{x}_t=\sqrt{\alpha_t}\mathbf{x}_0 + \sqrt{1-\alpha_t}\epsilon_t}\Bigg[\frac{1-\alpha_t}{2\sigma^2_t\alpha_t}\bigg\lVert \epsilon_t\ -\ \epsilon^{(t)}_\theta(\mathbf{x}_t)\bigg\rVert^2_2 \Bigg] \\ &= \sum^T_{t=1}\frac{1-\alpha_t}{2\sigma^2_t\alpha_t}\mathbb{E}\bigg[\big\lVert \epsilon_t\ -\ \epsilon^{(t)}_\theta(\mathbf{x}_t)\big\rVert^2_2 \bigg] \\ &= L_\gamma \qquad \text{when }\gamma_t = \frac{1-\alpha_t}{2\sigma^2_t\alpha_t} \end{align}\]최종 objective function을 생략 없이 나타낸다면 아래와 같이 나타낼 수 있습니다.
\[J_\sigma(\epsilon_\theta) = L_\gamma(\epsilon_\theta) + C\]
4. Sampling From Generalized Generative Processes
🔎 Objective function $L_1$을 사용해서 Markov process와 Non-Markovian forward process를 학습합니다.
🔎 그렇기 때문에 pretrained DDPM을 $L_1$에 대한 해결책으로 사용할 수 있고 $\sigma$를 변경하여 새로운 generative process를 찾을 수 있습니다.
4.1 Denoising Diffusion Implicit Models
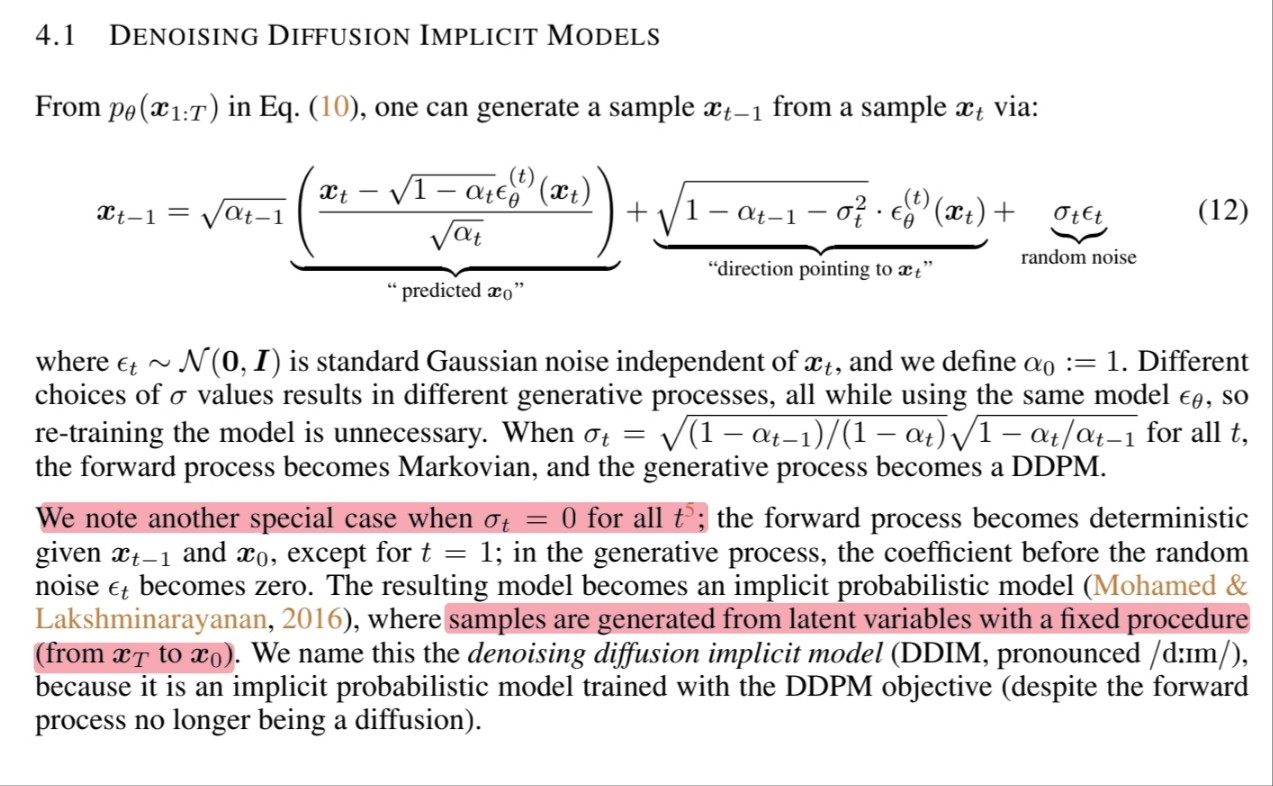
🔎 $\epsilon_{t} \sim \mathcal{N}(\mathrm{0}, \mathrm{I})$가 $\mathbf{x}_t$와 독립적이고 $\alpha_{0} := 1$이라 할 때 $\mathbf{x}_t$로부터 $\mathbf{x}_{t-1}$을 생성하는 식은 아래와 같습니다.
\[\begin{align} q_{\sigma}(\mathbf{x}_{t-1}|\mathbf{x}_{t}, \hat{\mathbf{x}}_{0}) &= q_{\sigma}(\mathbf{x}_{t-1}|\mathbf{x}_{t}, f_\theta^{(t)}(\mathbf{x}_t)) & \qquad \\ &= \mathcal{N}\big(\sqrt{\alpha_{t-1}}f_{\theta}^{(t)}(\mathbf{x}_{t}) + \sqrt{1-\alpha_{t-1} - \sigma^2_t}\cdot \frac{\mathbf{x}_t - \sqrt{\alpha_t}f_{\theta}^{(t)}(\mathbf{x}_{t})}{\sqrt{1-\alpha_t}}, \sigma^2_t\mathrm{I}\big) & \qquad \\ &= \sqrt{\alpha_{t-1}}f_{\theta}^{(t)}(\mathbf{x}_{t}) + \sqrt{1-\alpha_{t-1} - \sigma^2_t}\cdot \frac{\mathbf{x}_t - \sqrt{\alpha_t}f_{\theta}^{(t)}(\mathbf{x}_{t})}{\sqrt{1-\alpha_t}} + \sigma_t \epsilon_t & \qquad \\ &= \sqrt{\alpha_{t-1}}\Bigg(\frac{\mathbf{x}_t - \sqrt{1-\alpha_{t}}\cdot \epsilon_{\theta}^{t}(\mathbf{x}_{t})}{\sqrt{\alpha_{t}}} \Bigg) + \sqrt{1-\alpha_{t-1} - \sigma^2_t}\cdot \frac{\mathbf{x}_t - \sqrt{\alpha_t}\big(\frac{\mathbf{x}_t - \sqrt{1-\alpha_{t}}\cdot \epsilon_{\theta}^{t}(\mathbf{x}_{t})}{\sqrt{\alpha_{t}}} \big)}{\sqrt{1-\alpha_t}} + \sigma_t \epsilon_t & \qquad \because f_{\theta}^{(t)}(\mathbf{x}_{t}) = \frac{\mathbf{x}_t - \sqrt{1-\alpha_{t}}\cdot \epsilon_{\theta}^{t}(\mathbf{x}_{t})}{\sqrt{\alpha_{t}}}\\ &= \sqrt{\alpha_{t-1}}\underset{\text{"predicted }\mathbf{x}_{0}\text{"}}{\underbrace{\bigg(\frac{\mathbf{x}_{t} - \sqrt{1-\alpha_{t}}\epsilon^{(t)}_{\theta}(\mathbf{x}_{t})}{\sqrt{\alpha_{t}}}\bigg)}}\ +\ \underset{\text{"direction pointing to }\mathbf{x}_{t}\text{"}}{\underbrace{\sqrt{1 - \alpha_{t-1} - \sigma^{2}_{t}}\ \cdot\ \epsilon^{(t)}_{\theta}(\mathbf{x}_{t})}}\ +\ \underset{\text{random noise}}{\underbrace{\sigma_{t}\epsilon_{t}}} & \qquad \\ \end{align}\]🔎 위에서 생각했던 것처럼 $\sigma$를 다르게 선택하면 다른 generative process가 발생하므로 모델을 다시 학습시켜야 합니다.
🔎 $\sigma_t$를 $\sqrt{(1-\alpha_{t-1})/(1-\alpha_{t})}\sqrt{1-\alpha_{t}/\alpha_{t-1}}$로 설정했을 때 forward process와 generative process는 DDPM이 됩니다.
💡 $\sigma_{t} = \sqrt{(1-\alpha_{t-1})/(1-\alpha_{t})}\sqrt{1-\alpha_{t}/\alpha_{t-1}}$은 DDPM에서 $\sigma_{t}$ 값으로 사용하는 $\tilde{\beta}_t$를 DDIM에서 사용하는 notation으로 변경한 식
🔎 $\sigma_t = 0$일 때 살펴보겠습니다.
$\mathbf{x}_{t-1}$과 $\mathbf{x}_{0}$가 주어졌을 때 forward process는 deterministic이 됩니다.
Random noise($\sigma_t\epsilon_t$)에서 $\epsilon_t$의 계수가 0이 됩니다.
Resulting model은 implicit probabilistic model이 되며 sample은 고정된 절차로 latent variables에서 생성됩니다.
💭 $\sigma_t = 0$으로 학습된 모델은 하나의 sample을 생성할 때 DDPM과 달리 고정된 latent를 가진다는 의미인 것 같습니다.
4.2 Accelerated Generation Processes
🔎 Denoising objective $L_1$은 $q_\sigma(\mathbf{x}_t|\mathbf{x}_0)$가 고정되어 있는 한 특정 forward procedure에 의존하지 않습니다.
💭 특정 forward procedure에 의존하지 않는 다는 것을 두 가지 측면으로 생각해 볼 수 있을 것 같습니다.
- $q_{\sigma}(\mathbf{x}_{t-1}|\mathbf{x}_{t}, \mathbf{x}_{0})$을 의미적으로 생각해보기
\[q_{\sigma}(\mathbf{x}_{t-1}|\mathbf{x}_{t}, \hat{\mathbf{x}}_{0}) = \sqrt{\alpha_{t-1}}\underset{\text{"predicted }\mathbf{x}_{0}\text{"}}{\underbrace{f_{\theta}^{(t)}(\mathbf{x}_{t})}}\ +\ \underset{\text{"direction pointing to }\mathbf{x}_{t}\text{"}}{\underbrace{\sqrt{1 - \alpha_{t-1} - \sigma^{2}_{t}}\ \cdot\ \epsilon^{(t)}_{\theta}(\mathbf{x}_{t})}}\ +\ \underset{\text{random noise}}{\underbrace{\sigma_{t}\epsilon_{t}}}\]
위의 식은 Prdicted $\mathbf{x}_0$, Direction pointing to $\mathbf{x}_t$, Random noise로 구분됩니다.
$\mathbf{x}_0$를 예측하고 예측된 $\mathbf{x}_0$을 $\mathbf{x}_t$의 방향으로 이동시킨 후 random noise를 추가해서 $\mathbf{x}_{t-1}$을 구한다고 생각할 수 있습니다.
그렇다면 $\mathbf{x}_0$를 예측하고 $\mathbf{x}_t$를 구하기만 한다면 random noise를 조절함으로써 $\mathbf{x}_{t-1}$ 뿐만 아니라 $\mathbf{x}_{t-2}$도 구할 수 있을 것이기 때문에 denoising objective는 특정 forward procedure에 의존하지 않는다라고 할 수 있을 것 같습니다.
- $q_{\sigma}(\mathbf{x}_{t-1}|\mathbf{x}_{t}, \mathbf{x}_{0})$가 어떻게 정의 되었는지 수식적으로 살펴보기
이전에 $q_{\sigma}(\mathbf{x}_{t}|\mathbf{x}_{0})$가 모든 $t$에 대해서 만족함을 보일 때 $q_{\sigma}(\mathbf{x}_{t-1}|\mathbf{x}_{t}, \mathbf{x}_{0})$가 아닌 $q_{\sigma}(\mathbf{x}_{t-2}|\mathbf{x}_{t}, \mathbf{x}_{0}) = \mathcal{N}\big(\sqrt{\alpha_{t-2}}\mathbf{x}_0 + \sqrt{1-\alpha_{t-2} - \sigma^2_t}\cdot \frac{\mathbf{x}_t - \sqrt{\alpha_t}\mathbf{x}_0}{\sqrt{1-\alpha_t}}, \sigma^2_t\mathrm{I}\big)$라고 했을 때 $q_{\sigma}(\mathbf{x}_{t-1}|\mathbf{x}_{0})$이 아닌 $q_{\sigma}(\mathbf{x}_{t-2}|\mathbf{x}_{0})$를 구할 수 있습니다.
해당 식을 subsequence에 대해 Bayes’rule로 처음 inference process(forward process)를 정의한 후 generative process를 정의하게 되면 $T$보다 짦은 subsequence 길이 만큼만으로도 sample을 만들 수 있습니다.
그렇기 때문에 $q_\sigma(\mathbf{x}_t|\mathbf{x}_0)$만 변경하지 않으면 (고정되어 있으면) denoising objective는 특정 forward procedure에 의존하지 않게 됩니다.
4.3 Relevance to Neural ODEs
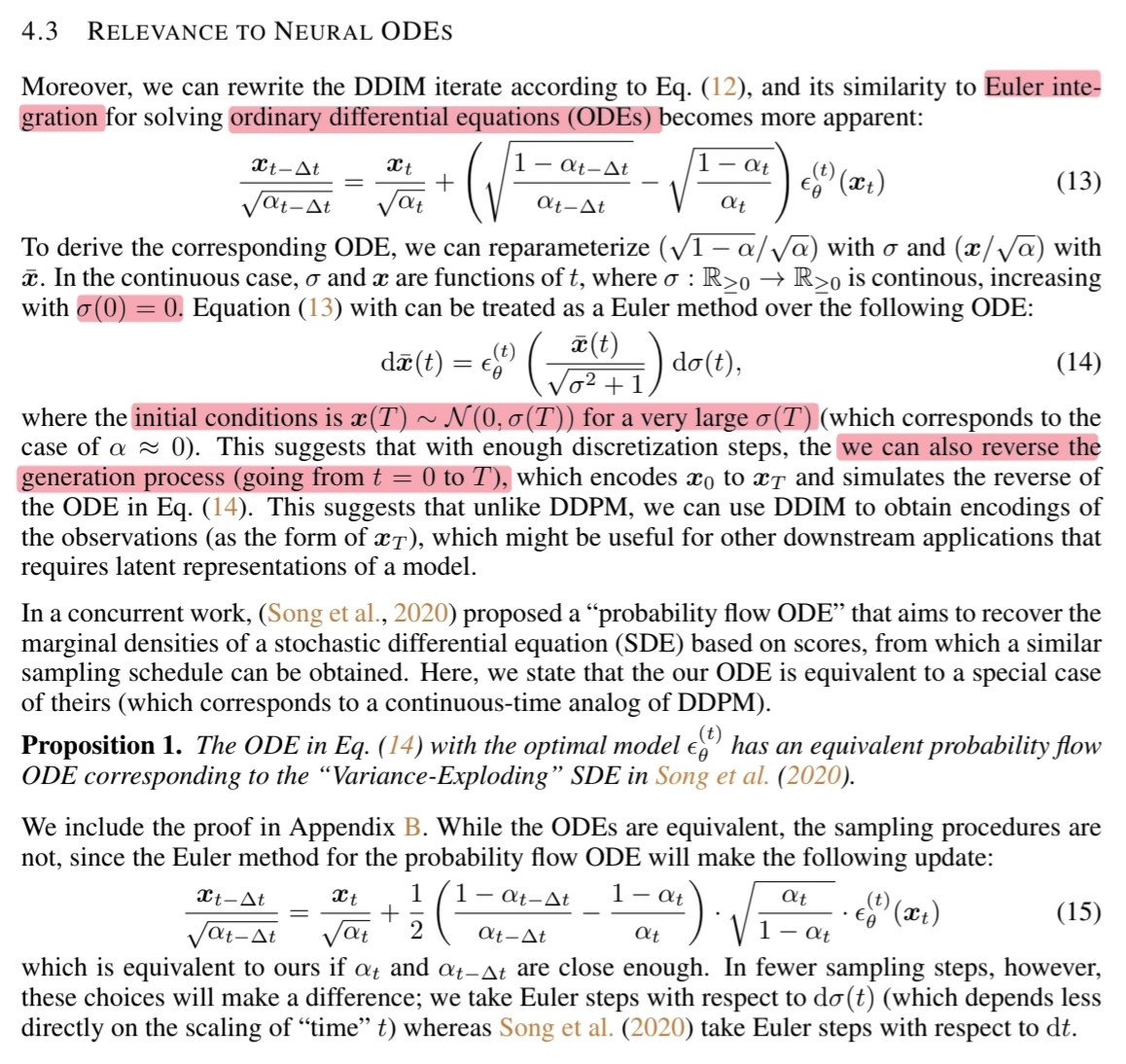
🔎 DDIM은 diffusion을 discrete하게 사용하기 때문에 미분 방정식이라 보긴 힘들지만 Euler’s method를 사용할 수 있는 sampling 형태를 가지고 있습니다.
Sampling
\[\mathbf{x}_{t-1} = \sqrt{\alpha_{t-1}}{\bigg(\frac{\mathbf{x}_{t} - \sqrt{1-\alpha_{t}}\epsilon^{(t)}_{\theta}(\mathbf{x}_{t})}{\sqrt{\alpha_{t}}}\bigg)}\ +\ \sqrt{1 - \alpha_{t-1} - \sigma^{2}_{t}}\ \cdot\ \epsilon^{(t)}_{\theta}(\mathbf{x}_{t})\ +\ \sigma_{t}\epsilon_{t}\]DDIM은 sampling 식에서 $\sigma_t = 0$으로 두어야 합니다.
\[\begin{align} \frac{\mathbf{x}_{t-1}}{\sqrt{\alpha_{t-1}}} &= \frac{\mathbf{x}_{t} - \sqrt{1-\alpha_{t}}\epsilon^{(t)}_{\theta}(\mathbf{x}_{t})}{\sqrt{\alpha_{t}}} + \frac{\sqrt{1 - \alpha_{t-1}}\ \cdot\ \epsilon^{(t)}_{\theta}(\mathbf{x}_{t})}{\sqrt{\alpha_{t-1}}} \\ &= \frac{\mathbf{x}_{t}}{\sqrt{\alpha_{t}}} + \Bigg(\frac{\sqrt{1 - \alpha_{t-1}}}{\sqrt{\alpha_{t-1}}} - \frac{\sqrt{1-\alpha_{t}}}{\sqrt{\alpha_{t}}}\Bigg)\cdot \epsilon^{(t)}_{\theta}(\mathbf{x}_{t}) \end{align}\]Discrete하기 때문에 시간 간격을 전부 $\Delta$로 바꿔줍니다.
\[\frac{\mathbf{x}_{t - \Delta t}}{\sqrt{\alpha_{t-\Delta t}}} = \frac{\mathbf{x}_{t}}{\sqrt{\alpha_{t}}} + \Bigg(\sqrt{\frac{1-\alpha_{t-\Delta t}}{\alpha_{t-\Delta t}}} - \sqrt{\frac{1-\alpha_{t}}{\alpha_{t}}} \Bigg)\cdot \epsilon^{(t)}_{\theta}(\mathbf{x}_{t})\]Euler’s method를 적용하기 위한 ODE로 만들기 위해 reparameterization을 합니다.
\[\frac{\sqrt{1-\alpha}}{\sqrt{\alpha}} = \sigma\ , \qquad \frac{\mathbf{x}}{\sqrt{\alpha}} = \bar{\mathbf{x}}\]Discrete한 sampling 식에 reaparameterization을 적용합니다.
\[\begin{align} \frac{\mathbf{x}_{t - \Delta t}}{\sqrt{\alpha_{t-\Delta t}}}\qquad =\qquad &\frac{\mathbf{x}_{t}}{\sqrt{\alpha_{t}}} + \Bigg(\sqrt{\frac{1-\alpha_{t-\Delta t}}{\alpha_{t-\Delta t}}} - \sqrt{\frac{1-\alpha_{t}}{\alpha_{t}}} \Bigg)\cdot \epsilon^{(t)}_{\theta}(\mathbf{x}_{t}) \\ \frac{\mathbf{x}_{t - \Delta t}}{\sqrt{\alpha_{t-\Delta t}}} - \frac{\mathbf{x}_{t}}{\sqrt{\alpha_{t}}}\qquad =\qquad &\Bigg(\sqrt{\frac{1-\alpha_{t-\Delta t}}{\alpha_{t-\Delta t}}} - \sqrt{\frac{1-\alpha_{t}}{\alpha_{t}}} \Bigg)\cdot \epsilon^{(t)}_{\theta}(\mathbf{x}_{t}) \\ \mathrm{d}\bar{\mathbf{x}}(t)\qquad =\qquad &\mathrm{d}\sigma(t)\cdot \epsilon^{(t)}_{\theta}(\mathbf{x}_{t}) \\ \mathrm{d}\bar{\mathbf{x}}(t)\qquad =\qquad & \epsilon^{(t)}_{\theta}(\mathbf{x}_{t}) \mathrm{d}\sigma(t)\\ \mathrm{d}\bar{\mathbf{x}}(t)\qquad =\qquad & \epsilon^{(t)}_{\theta}\Bigg(\frac{\bar{\mathbf{x}}}{\sqrt{\sigma^2 + 1}}\Bigg) \mathrm{d}\sigma(t)\\ \end{align}\]
🔎 수정한 sampling 식은 ODE이므로 Euler’s method를 적용할 수 있습니다. 이 때 초기값은 매우 큰 $\sigma(T)$에 대하여 $\mathbf{x}(T) \sim \mathcal{N}(0, \sigma(T))$입니다.
🔎 이는 discretization step이 충분하면 $\mathbf{x}_{0}$를 $\mathbf{x}_{T}$로 인코딩 하고 위의 수정된 sampling 식의 역을 통해 디코딩 할 수 있음을 의미 합니다.
🔎 또한 $\mathbf{x}_{0}$의 인코딩 값 $\mathbf{x}_{T}$을 얻을 수 있다는 것은 모델의 latent representations를 필요로 하는 다른 downstream applications에 유용할 수 있습니다.
💭 GANs처럼 latent interpolation이 가능하지 않을까 합니다.
5. Experiments
🔎 해당 section에서는 아래의 내용들을 보여줍니다.
- DDPM보다 빠른 속도의 이미지 생성 (Section 5.1)
- DDPM과 달리 initial latent variables $\mathbf{x}_{T}$가 고정되면 DDIM은 high-level image feature를 유지 (Section 5.2)
- DDIM은 latent space에서 직접 interpolation (Section 5.3)
- Latent code로부터 reconstruction (Section 5.4)
- Deterministic DDIM과 stochastic DDPM 사이를 보간하는 $\tau$와 $\sigma$를 제어 (Section 5.1)
🔎 실험들의 비교를 단순화하기 위해 $\sigma$를 아래와 같이 고려합니다. 이때, $\eta$는 직접 제어가 가능한 hyperparameter이며 $\eta$를 조절해서 DDPM과 DDIM을 비교할 수 있습니다.
\[\sigma_{\tau_i}(\eta) = \eta\sqrt{(1-\alpha_{\tau_{i-1}})/(1-\alpha_{\tau_i})}\sqrt{1-\alpha_{\tau_i}/\alpha_{\tau_{i-1}}}\]🔎 $\sigma = 1$보다 큰 standard deviation을 갖는 random noise를 사용한 DDPM을 고려합니다.
\[\hat{\sigma}:\ \hat{\sigma}_{\tau_i} = \sqrt{1-\alpha_{\tau_i}/\alpha_{\tau_{i-1}}}\]5.1 Sample Quality And Efficiency
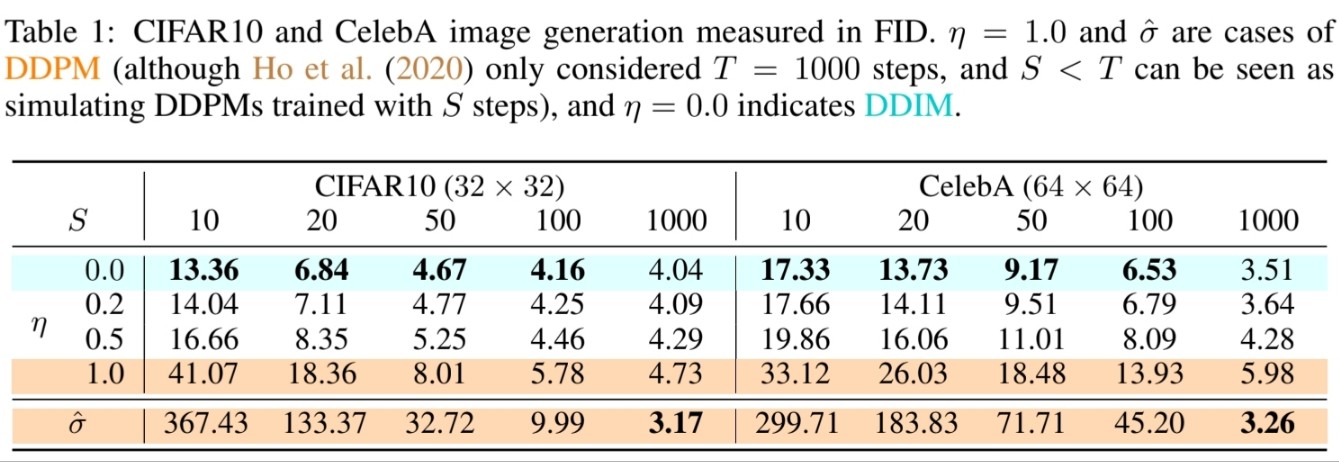
🔎 Sample quality는 $\text{dim}(\tau)$를 증가시킴에 따라 더 좋아집니다.
🔎 Sample Quality와 Computation cost는 반비례
🔎 DDPM의 경우 급격히 sample quality가 안좋아지는 반면 DDIM은 일관되게 좋은 sample quality를 유집합니다.
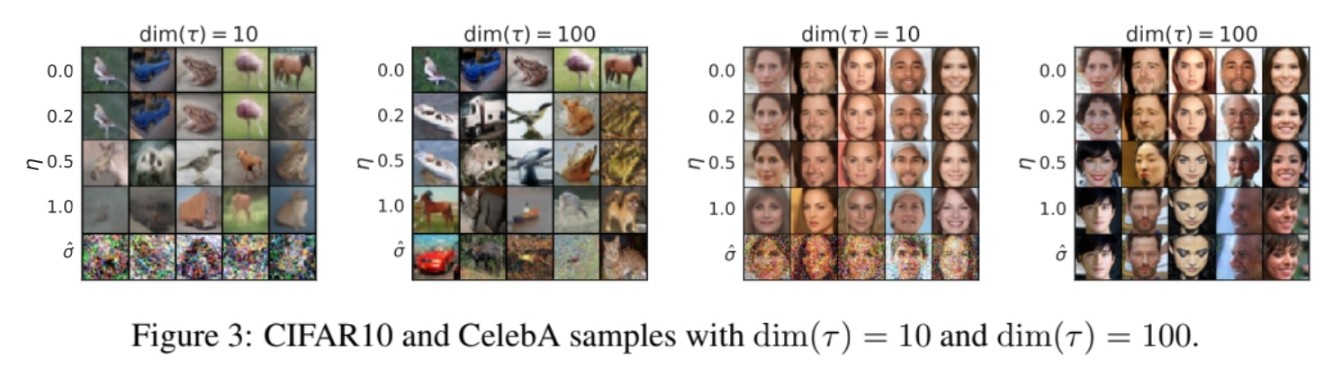
🔎 동일한 $\text{dim}(\tau)$에서 $\sigma$가 달라짐에 따라 생성된 sample을 확인할 수 있습니다.
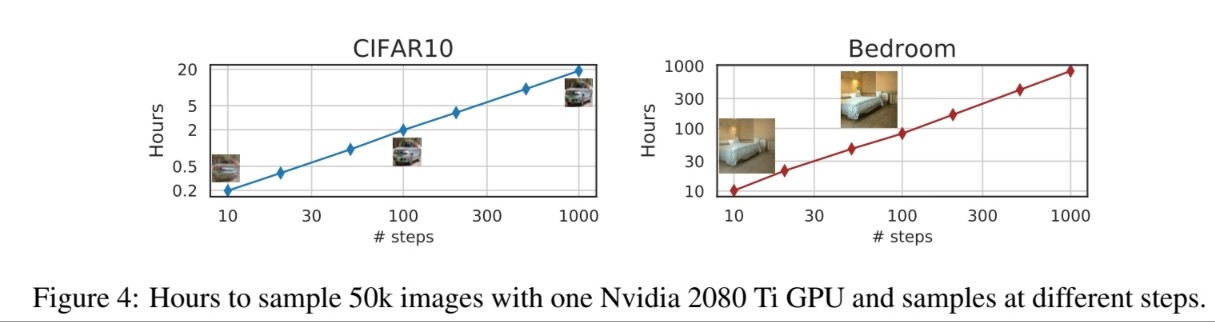
🔎 $\text{dim}(\tau)$에 따라 sample을 생성하는데 걸리는 시간이 선형적으로 증가함을 보여줍니다.
5.2 Sample Consistency In DDIMs
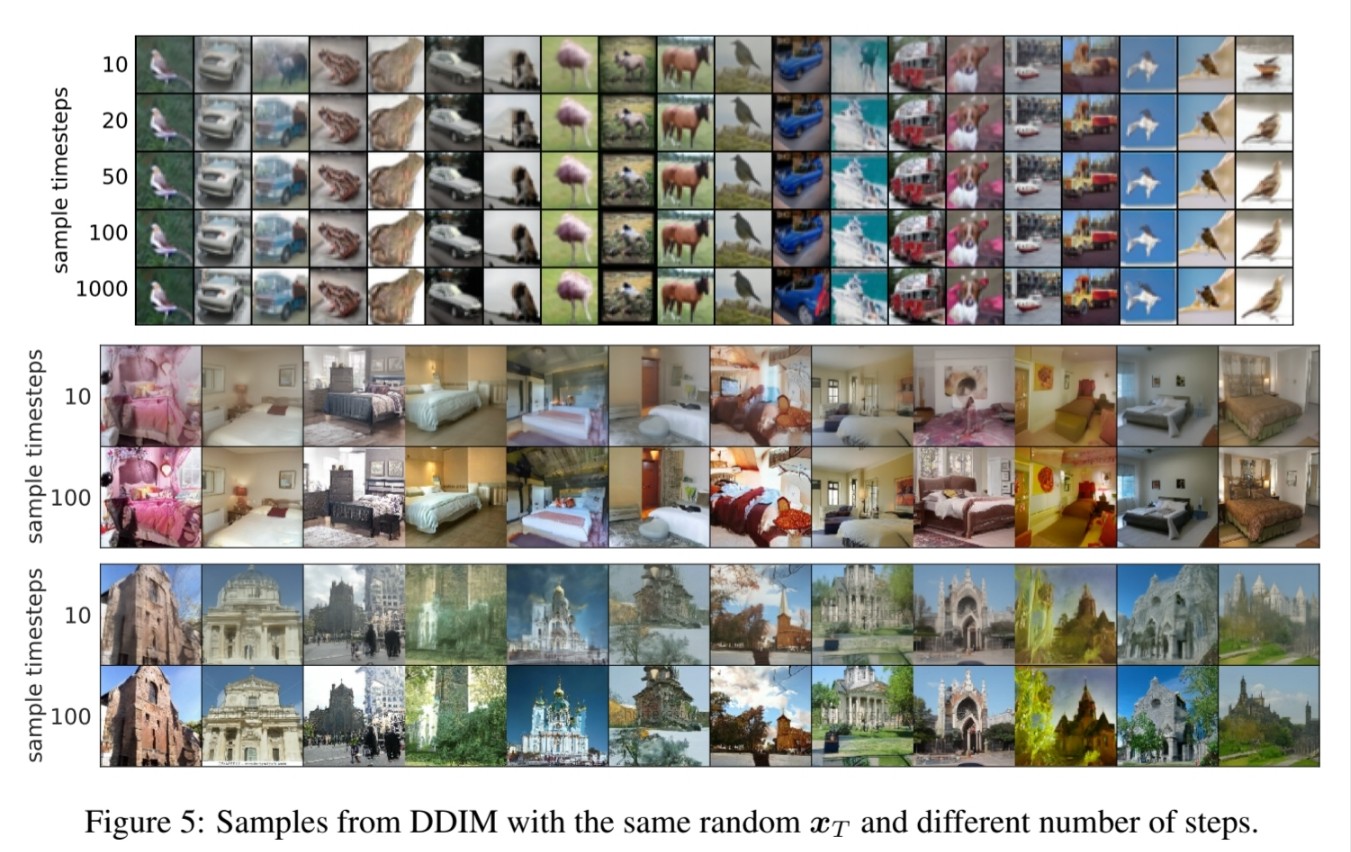
🔎 동일한 $\mathbf{x}_T$으로 시작하면서 서로 다른 generative trajectories($\tau$)에서 생성된 이미지를 볼 수 있습니다.
🔎 많은 경우 20 steps로 생성된 sample은 이미 1000 steps로 생성된 sample과 매우 유사하며 세부 사항에 있어서 약간의 차이만 있습니다.
🔎 따라서 $\mathbf{x}_T$만이 $\mathbf{x}_0$의 유일한 latent encoding입니다.
🔎 $\text{dim}(\tau)$이 클수록 즉, timestep이 클수록 더 좋은 sample quality를 보이지만 timestep의 길이는 high-level feature와는 상관이 없어 보입니다.
5.3 Interpolation In Detecministic Generative Processes
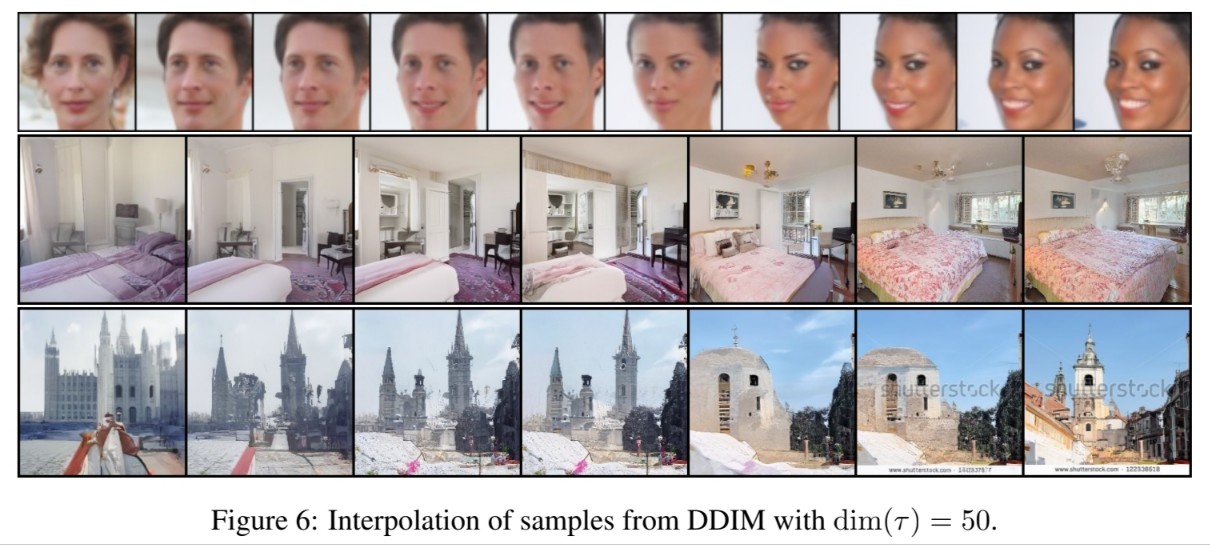
🔎 $\mathbf{x}_T$에 의해서 인코딩 되기 때문에 GANs과 같이 semantic interpolation이 가능해집니다.
5.4 Reconstruction From Latent Space

🔎 Reconstruction error를 계산 했을 때 DDIM은 더 큰 $S$에 대해 더 낮은 값을 가집니다.